Gestion des processus
Généralités
Un système d’exploitation se compose de processus. Ces derniers,sont exécutés dans un ordre bien précis et observent des liens de parenté entre eux. On distingue deux catégories de processus, ceux axés sur l’environnement utilisateur et ceux sur l’environnement matériel.
Lorsqu’un programme s’exécute, le système va créer un processus en plaçant les données et le code du programme en mémoire et en créant une pile d’exécution. Un processus est donc une instance d’un programme auquel est associé un environnement processeur (compteur ordinal, registres, etc.) et un environnement mémoire.
Chaque processus dispose :
-
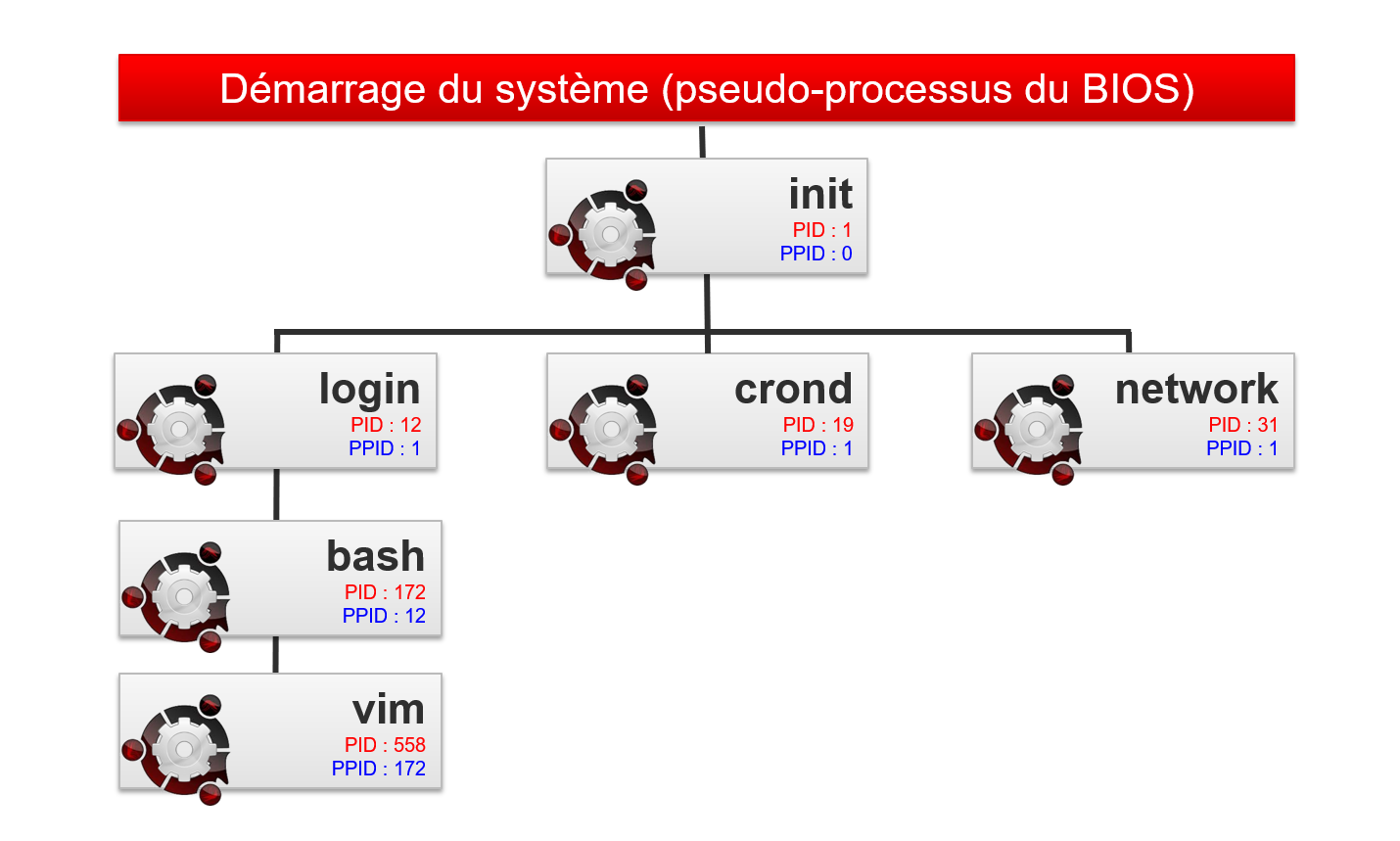
d’un PID : Process IDentifiant, identifiant unique de processus ;
-
d’un PPID : Parent Process IDentifiant, identifiant unique de processus parent.
Par filiations successives, le processus init est le père de tous les processus.
-
Un processus est toujours créé par un processus père ;
-
Un processus père peut avoir plusieurs processus fils.
Il existe une relation père / fils entre les processus, un processus fils est le résultat de l’appel système de la primitive fork() par le processus père qui duplique son propre code pour créer un fils. Le PID du fils est renvoyé au processus père pour qu’il puisse dialoguer avec. Chaque fils possède l’identifiant de son père, le PPID.
Le numéro PID représente le processus au moment de son exécution. À la fin de celui-ci, le numéro est de nouveau disponible pour un autre processus. Exécuter plusieurs fois la même commande produira à chaque fois un PID différent.
|
Les processus ne sont pas à confondre avec les threads. Chaque processus possède son propre contexte mémoire (ressources et espace d’adressage) alors que les threads issus d’un même processus partagent ce même contexte. |
Visualisation des processus
La commande ps affiche l’état des processus en cours.
ps [-e] [-f] [-u login]Exemple :
# ps -fu root| Option | Description |
|---|---|
|
Affiche tous les processus. |
|
Affiche des informations supplémentaires. |
|
Affiche les processus de l’utilisateur. |
Quelques options supplémentaires :
| Option | Description |
|---|---|
|
Affiche les processus du groupe. |
|
Affiche les processus exécutés à partir du terminal. |
|
Affiche les informations du processus. |
|
Affiche les informations sous forme d’arborescence. |
|
Affiche des informations supplémentaires. |
|
Trier le résultat selon une colonne. |
|
Affiche l’en-tête sur chaque page du terminal. |
|
Personnalise le format d’affichage de sortie. |
Sans option précisée, la commande ps n’affiche que les processus exécutés à partir du terminal courant.
Le résultat est affiché par colonnes :
# ps -ef
UID PID PPID C STIME TTY TIME CMD
root 1 0 0 Jan01 ? 00:00/03 /sbin/init| Colonne | Description |
|---|---|
|
Utilisateur propriétaire. |
|
Identifiant du processus. |
|
Identifiant du processus parent. |
|
Priorité du processus. |
|
Date et heure d’exécution. |
|
Terminal d’exécution. |
|
Durée de traitement. |
|
Commande exécutée. |
Le comportement de la commande peut être totalement personnalisé :
# ps -e --format "%P %p %c %n" --sort ppid --headers
PPID PID COMMAND NI
0 1 systemd 0
0 2 kthreadd 0
1 516 systemd-journal 0
1 538 systemd-udevd 0
1 598 lvmetad 0
1 643 auditd -4
1 668 rtkit-daemon 1
1 670 sssd 0Types de processus
Le processus utilisateur :
-
est démarré depuis un terminal associé à un utilisateur ;
-
accède aux ressources via des requêtes ou des démons.
Le processus système (démon) :
-
est démarré par le système ;
-
n’est associé à aucun terminal et son propriétaire est un utilisateur système (souvent
root) ; -
est chargé lors du démarrage, il réside en mémoire et est en attente d’un appel ;
-
est généralement identifié par la lettre
dassocié au nom du processus.
Les processus système sont donc appelés démons de l’anglais daemon (Disk And Execution MONitor).
Permissions et droits
À l’exécution d’une commande, les identifiants de l’utilisateur sont transmis au processus créé.
Par défaut, les UID et GID effectifs (du processus) sont donc identiques aux UID et GID réels (les UID et GID de l’utilisateur qui a exécuté la commande).
Lorsqu’un SUID (et/ou un SGID) est positionné sur une commande, les UID (et/ou GID) effectifs deviennent ceux du propriétaire (et/ou du groupe propriétaire) de la commande et non plus celui de l’utilisateur ou du groupe utilisateur qui a lancé la commande. UID effectifs et réels sont donc différents.
À chaque accès à un fichier, le système vérifie les droits du processus en fonction de ses identifiants effectifs.
Gestion des processus
Un processus ne peut pas être exécuté indéfiniment, cela se ferait au détriment des autres processus en cours et empêcherait de faire du multitâche.
Le temps de traitement total disponible est donc divisé en petites plages et chaque processus (doté d’une priorité) accède au processeur de manière séquencée. Le processus prendra plusieurs états au cours de sa vie parmi les états :
-
prêt : attend la disponibilité du processus ;
-
en exécution : accède au processeur ;
-
suspendu : en attente d’une E/S (entrée/sortie) ;
-
arrêté : en attente d’un signal d’un autre processus ;
-
zombie : demande de destruction ;
-
mort : le père du processus tue son fils.
Le séquencement de fin de processus est le suivant :
-
Fermeture des fichiers ouverts ;
-
Libération de la mémoire utilisée ;
-
Envoi d’un signal au processus père et aux processus fils.
Lorsqu’un processus père meurt, ses processus fils sont dits orphelins. Ils sont alors adoptés par le processus init qui se chargera de les détruire.
La priorité d’un processus
Le processeur travaille en temps partagé, chaque processus occupe un quantum de temps du processeur.
Les processus sont classés par priorité dont la valeur varie de -20 (la priorité la plus élevée) à +20 (la priorité la plus basse).
La priorité par défaut d’un processus est 0.
Modes de fonctionnements
Les processus peuvent fonctionner de deux manières :
-
synchrone: l’utilisateur perd l’accès au shell durant l’exécution de la commande. L’invite de commande réapparaît à la fin de l’exécution du processus. -
asynchrone: le traitement du processus se fait en arrière-plan, l’invite de commande est ré-affichée immédiatement
Les contraintes du mode asynchrone :
-
la commande ou le script ne doit pas attendre de saisie au clavier ;
-
la commande ou le script ne doit pas retourner de résultat à l’écran ;
-
quitter le shell termine le processus.
Les commandes de gestion des processus
La commande kill
La commande kill envoie un signal d’arrêt à un processus.
kill [-signal] PIDExemple :
$ kill -9 1664| Code | Signal | Description |
|---|---|---|
|
SIGINT |
Interruption du processus (kbd:[CTRL+D]) |
|
SIGKILL |
Terminaison immédiate du processus |
|
SIGTERM |
Terminaison propre du processus |
|
SIGCONT |
Reprise du processus |
|
SIGSTOP |
Suspension du processus |
Les signaux sont les moyens de communication entre les processus. La commande kill permet d’envoyer un signal à un processus.
|
La liste complète des signaux pris en compte par la commande |
La commande nohup
La commande nohup permet de lancer un processus indépendant d’une connexion.
nohup commandeExemple :
$ nohup MonProgramme.sh 0</dev/null &nohup ignore le signal SIGHUP envoyé lors de la déconnexion d’un utilisateur.
|
|
[CTRL] + [Z]
En appuyant simultanément sur les touches kbd:[CTRL+Z], le processus synchrone est temporairement suspendu. L’accès au prompt est rendu après affichage du numéro du processus venant d’être suspendu.
Instruction &`
L’instruction & exécute la commande en mode asynchrone (la commande est alors appelée job) et affiche le numéro de job. L’accès au prompt est ensuite rendu.
Exemple :
$ time ls -lR / > list.ls 2> /dev/null &
[1] 15430
$Le numéro de job est obtenu lors de la mise en tâche de fond et est affiché entre crochets, suivi du numéro de PID.
Les commandes fg et bg
La commande fg place le processus au premier plan :
$ time ls -lR / > list.ls 2>/dev/null &
$ fg 1
time ls -lR / > list.ls 2/dev/nulltandis que la commande bg le place à l’arrière plan :
[CTRL]+[Z]
^Z
[1]+ Stopped
$ bg 1
[1] 15430
$Qu’il ait été mis à l’arrière plan lors de sa création grâce à l’argument & ou plus tard avec les touches kbd:[CTRL+Z], un processus peut être ramené au premier plan grâce à la commande fg et à son numéro de job.
La commande jobs
La commande jobs affiche la liste des processus tournant en tâche de fond et précise leur numéro de job.
Exemple :
$ jobs
[1]- Running sleep 1000
[2]+ Running find / > arbo.txtLes colonnes représentent :
-
le numéro de job ;
-
ordre de passage des processus
-
un
+: le processus est le prochain processus à s’exécuter par défaut avecfgoubg; -
un
-: le processus est le prochain processus qui prendra le+;
-
-
Running (en cours de traitement) ou Stopped (processus suspendu).
-
la commande
Les commandes nice et renice
La commande nice permet d’exécuter une commande en précisant sa priorité.
nice priorité commandeExemple :
$ nice -n+15 find / -name "fichier"Contrairement à root, un utilisateur standard ne peut que réduire la priorité d’un processus. Seules les valeurs entre +0 et +19 seront acceptées.
|
Cette dernière limitation peut être levée par utilisateurs ou par groupes en modifiant le fichier |
La commande renice permet de modifier la priorité d’un processus en cours d’exécution.
renice priorité [-g GID] [-p PID] [-u UID]Exemple :
$ renice +15 -p 1664
| Option | Description |
|---|---|
|
|
|
|
|
|
La commande renice agit sur des processus déjà en cours d’exécution. Il est donc possible de modifier la priorité d’un processus précis, mais aussi de plusieurs processus appartenant à un utilisateur ou à un groupe.
|
La commande |
La commande top
La commande top affiche les processus et leur consommation en ressources.
$ top
PID USER PR NI ... %CPU %MEM TIME+ COMMAND
2514 root 20 0 15 5.5 0:01.14 top| Colonne | Description |
|---|---|
|
Identifiant du processus. |
|
Utilisateur propriétaire. |
|
Priorité du processus. |
|
Valeur du nice. |
|
Charge du processeur. |
|
Charge de la mémoire. |
|
Temps d’utilisation processeur. |
|
Commande exécutée. |
La commande top permet de contrôler les processus en temps réel et en mode interactif.
Les commandes pgrep et pkill
La commande pgrep cherche parmi les processus en cours d’exécution un nom de processus et affiche sur la sortie standard les PID correspondant aux critères de sélection.
La commande pkill enverra le signal indiqué (par défaut SIGTERM) à chaque processus.
pgrep processus
pkill [-signal] processusExemples :
-
Récuperer le numéro de processus de
sshd:
$ pgrep -u root sshd-
Tuer tous les processus
tomcat:
$ pkill tomcat